ROS Topics: Publishers and Subscribers
In deze workshop leer je de basis van ROS2 topics. De theorie hiervan wordt gedoceerd, maar kun je ook vinden op deze website van ROS

We gaan in deze en volgende workshops aan de slag met een hoogte meting van dozen op een conveyor(transportband), zie afbeelding hieronder.
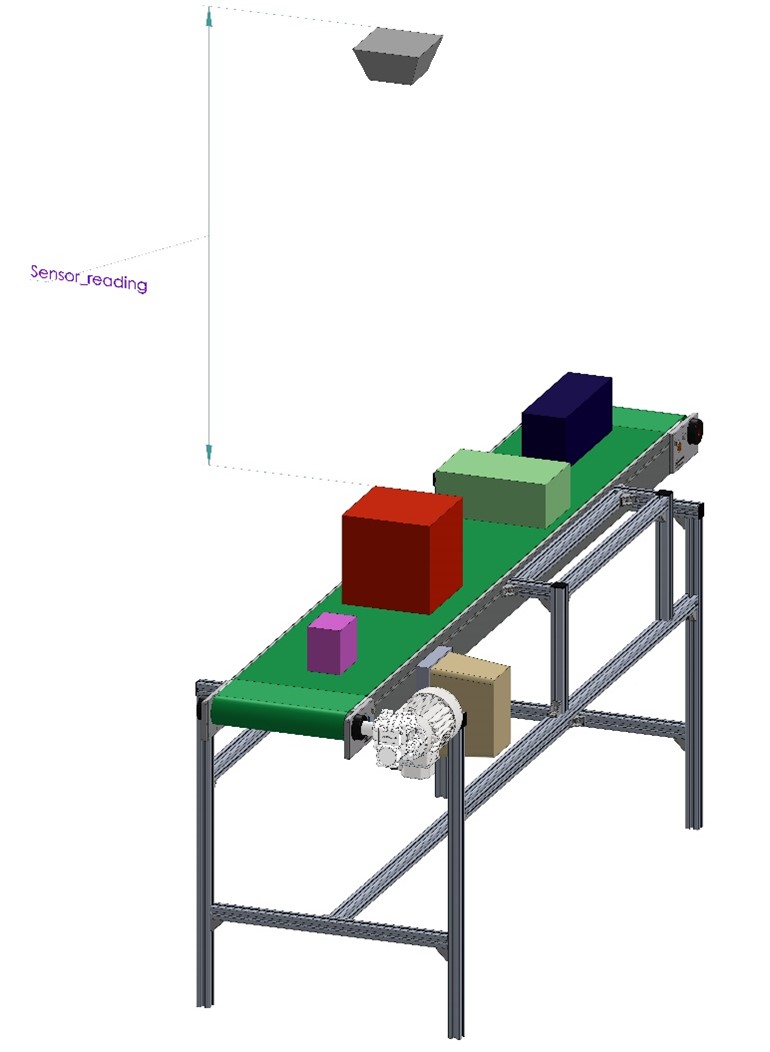
In de workshop wordt de meetwaarde van de range-sensor gepresenteerd door het topic /sensor_info. Er zijn twee methodes om deze sensorwaardes te genereren:
Start de node die de range-sensor simuleert.
ros2 run range_sensor sensor_info_publisher_simulation
In de terminal zal slechts 1 regel output worden gegenereerd
De sensor waardes worden gegenereert met een ultrasoonsensor die aangesloten is op een ESP32-board(Embedded System). Dit staat beschreven in: ESP32 ultatrasonic-sensor
Controleer of de range-sensor node ook daadwerkelijk gestart is(doe dit in een nieuwe terminal)
ros2 node list
Bekijk welke topics(onderwerpen) door de node gepubliceerd worden
ros2 topic list
Volg de messages(berichten) die op het topic worden gepubliceerd
ros2 topic echo /sensor_info
Je kunt deze monitor stoppen door ctrl+c
Informatie opvragen over het gebruik van de topic
ros2 topic info /sensor_info
Je vindt hierin de volgende informatie
Bericht type, ook wel “interface” genoemd in ROS2 (waarbij “interface” verwijst naar berichten, services en acties), of message-type genoemd
Aantal nodes dat publiceren op dit topic
Aantal nodes dat lezen van dit topic
In ROS2 verwijst “interface” naar berichten (messages), services en acties; met het onderstaande commando vraag je specifiek de definitie van het bericht (message type) op.
ros2 interface show range_sensors_interfaces/msg/SensorInformation
Opdracht 1
In deze opdracht ga je een subscriber maken in een Python programma op het topic /sensor_info
Je gaat daartoe het Python programma assignment1.py bewerken op bepaalde aangeven plaatsen.
Je kunt de broncode van het programma openen met de editor uit je development omgeving(bijvoorbeeld Visual Code), door naar de juiste map/directory te navigeren. Het bestand bevindt zich op de volgende locatie: ~/ros2_industrial_ws/src/ROS2_industrial/1_basics/range_sensor/range_sensor/
Als alternatief kunt het bestand ook op de volgende wijze openen:
gedit ~/ros2_industrial_ws/src/ROS2_industrial/1_basics/range_sensor/range_sensor/assignment1.py
Opmerking: als gedit nog niet is geinstalleerd dan kun je dat als volgt doen:
sudo apt install gedit
Opdracht 1: Creeër een Python subscriber
Maak een subscriber aan met de volgende gegevens:
Topic: /sensor_info
Message-type: SensorInformation
Callback: sensor_info_callback
Noem de subscriber ‘sensor_info_subscription’ en wijs deze toe aan self.sensor_info_subscription binnen de constructor of een methode van de klasse, zodat de subscriber in de context van het object wordt aangemaakt.
Voer de code in onder onderstaande regel in het assignment1.py bestand, binnen de constructor (__init__ methode) van de klasse:
#<Todo 1, creëer hier de subscriber op het topic /sensor_info>*
Test de werking van het programma
ros2 run range_sensor assignment1
Opdracht 2: Bereken de hoogte van de doos en druk deze af
In deze opdracht ga je de hoogte van het object op de conveyor berekenen. De sensor is op 2 meter hoogt t.o.v. de conveyor gemonteerd. Maak een berekening voor de hoogte van het object onder de sensor door schuift. Druk deze hoogte af met het “self.get_logger().info()” statement in de “sensor_info_callback()” member-functie.
Voer de code in onder onderstaande regel in het assignment1.py bestand
#<Todo 2, bereken hier de hoogte van het object>*
Let op: Volgens het gegevensblad van de sensor meet de sensor tot 2.0 meter, echter metingen groter dan 1.9 meter zijn zeer onderhevig aan ruis en kunnen z.g.n. false-positive metingen opleveren. Houd hiermee rekening in je berekening.
Test de werking van het programma
ros2 run range_sensor assignment1
Opdracht 3: Creeër een nieuw message type
In deze opdracht ga je een nieuw message type maken waarin later, via een topic, de hoogte van het object onder de sensor wordt gepubliceerd. Naam message type: BoxHeightInformation Infomatie in message type: box_height (type float32)
Volg daar toe de volgende handelingen
Navigeer naar de directory msgs in de package range_sensors_interfaces
Maak een nieuw bestand BoxHeightInformation.msg
Open het bestand en voeg de volgende regel toe:
float32 box_height # Height of box
Sla het bestand op
Om dit nieuwe type in de Colcon build op te nemen dien je het CMakeLists.txt bestand kenbaar te maken dat er een message type wordt toegevoegd.
Navigeer naar de root-directory van de package package range_sensors_interfaces
Open het bestand CMakeLists.txt (dit is bestaand bestand)
Zoek de regel met rosidl_generate_interfaces(${PROJECT_NAME} op.
Plaats onder de regel de volgende regel:
“msg/BoxHeightInformation.msg”
Sla het bestand op
Vervolgens dient je workspace gebouwd te worden:
Navigeer naar de root-directory van je workspace
cd ~/ros2_industrial_ws/
Bouw het de workspace:
colcon build --symlink-install
–> Beter nog bouw alleen de package die je hebt gewijzigd
colcon build --symlink-install --packages-select range_sensors_interfaces
Activeer je nieuw geboude environment
source install/setup.bash
–> Of
source ~/ros2_industrial_ws/install/setup.bash
Let op: Dit laatste dien je te doen in alle geopende terminals
Controleren van je gemaakte message
Gebruik onderstaand commando om een lijst met alle messages, services en actions op te vragen
ros2 interface list
Je kunt ook een filter maken door midel van een gepijpt grep commando waar in een deel van de message naam is opgenomen (in dit geval Box)
ros2 interface list | grep Box
Bekijk of je message goed is gefineerd
ros2 interface show range_sensors_interfaces/msg/BoxHeightInformation
Opdracht 4: Creeër een Python publisher
Maak op een publisher aan met de volgende gegevens:
Topic: /box_height_info
Message-type: BoxHeightInformation
Queue-size: 10
Noem de publisher ‘box_height_publisher’, zorg ervoor dat dit in de context van de klasse gebeurt, door de self operator. Voer de code in onder onderstaande regel in het assignment1.py bestand
#<Todo 3, Creëer hier de publisher voor het publiceren van de box hoogte>
Om er voor te zorgen dat het message-type beschikbaar is in je programma dien je de juist library te importeren.
Voer de code in onder onderstaande regel in het assignment1.py bestand:
#< Todo 4, importeer hier de message type die je hebt aangemaakt voor de box hoogte>
Je hebt nu een publisher gemaakt, waarop je de box hoogte kunt publiceren. Voeg daartoe code toe op de plaats waar je de box hoogte hebt berekend. Maak daarvoor eerst het volgende object aan in de functie de die box hoogte berekend
box_height_info = BoxHeightInformation()
Vul daarna het object in met de box hoogte
box_height_info.box_height = <<door jou berekende box hoogte>>
Als laatste kun je de de box hoogte publiseren
self.box_height_publisher.publish(box_height_info)
Test het programma door in 3 terminals de volgende nodes te starten
ros2 run range_sensor sensor_info_publisher_simulation
ros2 run range_sensor <node van opdracht 1>
ros2 topic echo <topic waarin de box hoogte is gepubliceert>
Test de werking van de opdracht en voer eventueel verbeteringen door in de opdracht code.
Opdracht 5 Gebruik rgt-graph
Je kunt een grafisch overzich maken van alle nodes en hun bijbehorende topics met het volgende commando. Zorg er wel voor dat je de nodes uit opdracht 4. hebt gestart.
ros2 run rqt_graph rqt_graph
Maak een evaluatie van wat door rqt_graph wordt gepresenteerd. Je kunt deze tool gebruiken om inzcht in de communicatiestromen van je applicatie te krijgen.
Opdracht 6: Opschonen
Schoon je programma van assignment1.py op:
Verwijder alle onnodige “self.get_logger().info()” statements
Voorzie je programma van functioneel commentaar
Functioneel commentaar betekent dat je bij je code uitlegt wat het doel en de werking van functies, klassen en belangrijke codeblokken is. Bijvoorbeeld:
# Deze functie berekent de hoogte van de doos op basis van de sensorwaarde def bereken_box_hoogte(sensor_waarde): ...
rqt-tools
ROS2 heeft een aantal handige tools die je kunt gebruiken om de werking van je nodes en topics te monitoren. Deze tools zijn onderdeel van het rqt-framework, een grafische interface voor ROS2.
rqt
Je kunt de rqt-interface starten met het volgende commando. Met deze interface kun je verschillende plugins gebruiken om je ROS2-systeem te monitoren, zoals bijvoorbeeld topics, nodes, parameters, etc.. Je kunt topics monitoren door de juiste plugin te selecteren in het rqt-menu. Envervolgens kun je de gewenste topics toevoegen aan de interface om hun data te bekijken. Zorg er wel voor dat je de nodes uit opdracht 1.4. hebt gestart.
ros2 run rqt rqt
rqt-graph
Je kunt een grafisch overzicht maken van alle nodes en hun bijbehorende topics met het volgende commando. Zorg er wel voor dat je de nodes uit opdracht 1.4. hebt gestart.
ros2 run rqt_graph rqt_graph
Maak een evaluatie van wat door rqt en rqt_graph wordt gepresenteerd. Je kunt deze tools gebruiken om inzcht in de communicatiestromen van je applicatie te krijgen.
Opdracht 7: Tijd_publisher(uitdaging)
Meek een node genaamd tijd_publisher die op een topic genaamd “/current_time” de huidige tijd publiceert. Gebruik hiervoor het message type “std_msgs/msg/String”. Je kunt de huidige tijd verkrijgen met behulp van de Python module “datetime”.
Test de werking van deze node door in een terminal de volgende commando’s uit te voeren:
ros2 run range_sensor tijd_publisher
Hint
Voor het maken van deze node kun je de volgende stappen volgen:
Zorg ervoor de de
tijd_publishernode in desetup.pyvan de package is opgenomen, zodat deze kan worden gebouwd en uitgevoerd.Alvorens je de node kunt starten, dien je deze eerst te bouwen met het het
colcon buildcommando.Source daarna je environment opnieuw, zodat de nieuwe node beschikbaar is in je terminal.
En in een volgende terminal:
ros2 topic echo /current_time
Opdracht 8: Uitbreiding(uitdaging)
De ‘tijd_publisher’ node die je in opdracht 1.7 hebt gemaakt, publiceert is eigenlijk geplaatst in een package die bedoeld is voor range-sensor functionaliteit. Het is beter om deze node in een aparte package te plaatsen, zodat de functionaliteit beter gescheiden blijft. Maak een nieuwe package aan genaamd ‘time_publisher’ en verplaats de ‘tijd_publisher’ node naar deze nieuwe package. Zorg ervoor dat je de nodige aanpassingen maakt in de setup.py bestanden van de nieuwe package, zodat de node correct kan worden gebouwd en uitgevoerd.
ROS2 Tutorial: Creating Your First ROS2 Package
Maak een Python package aan met de naam ‘time_publisher’
Test de werking van deze node door in een terminal de volgende commando’s uit te voeren:
ros2 run time_publisher tijd_publisher
En in een volgende terminal:
ros2 topic echo /current_time